
iNav Konfiguration eines AR Wings und erste Hürden
Hier mal ein kleiner Einstieg in iNav 2.0 (RC4). Das kleine Tutorial ist an den AR Wing angelegt. Von daher kann das bei jedem anderen Flächenflieger wieder anders aussehen!
Mit ein bisschen umdenken jedoch sollte sich das fast auf jede andere Fläche umlegen lassen.
Beginnen wir mit der Firmware. Ich hab in meinen AR Wing jetzt eine FuriousFPV F35 verbaut. Da mich das bei meinen Skyhunter Nano mit der Omnibus so endlos genervt hat, die richtige Version für die Omnibus F4 zu finden. Von der Omnibus gib es anscheinen zig verschiedene versionen. 80% davon laufen mit der OmnibusF4V3 Firmware, so als kleiner Tipp nebenbei. Aber das ist eine andere Geschichte.
Geflasht wird wie wir es von Betaflight und Co kennen. Firmwareflasher -> FC -> Version auswählen.

Sollte das nicht funktionieren, müsst Ihr wie bei BF die üblichen Verdächtigen anwenden: Zadig, ImpulseRC Fixer usw… der Treiber muss passen. Ansonsten geht nichts. Mac User sollten hier keine Probleme haben.
Haben wir dann die iNav Firmware auf der FC, ist schon mal die erste Hürde geschafft. Jetzt gehts ans Konfigurieren. Richtige Verkabelung vorausgesetzt.
Nach dem Connecten sind wir erstmal im Setup Tab, von hier springen wir erstmal auf Calibration:


ACHTUNG sehr wichtig. Egal wie die FC verbaut wurde. Die muss jetzt so kalibriert werden, wir der Pfeil auf der FC ist! Kann sein das man da ein wenig umdenken muss.
Die Werte acczero_x acczero_y, acczero_z dürfen nicht 4096 oder auch nicht 0 sein. Weil dann stimmt was nicht! Anschließend save and reboot.
Der nächste Reiter ist dann unser Mixer:

Hier stellen wir den Flying Wing ein und drücken load and apply… was uns zu einem Neustart zwingt.
Weiter geht es dann mit den Presets
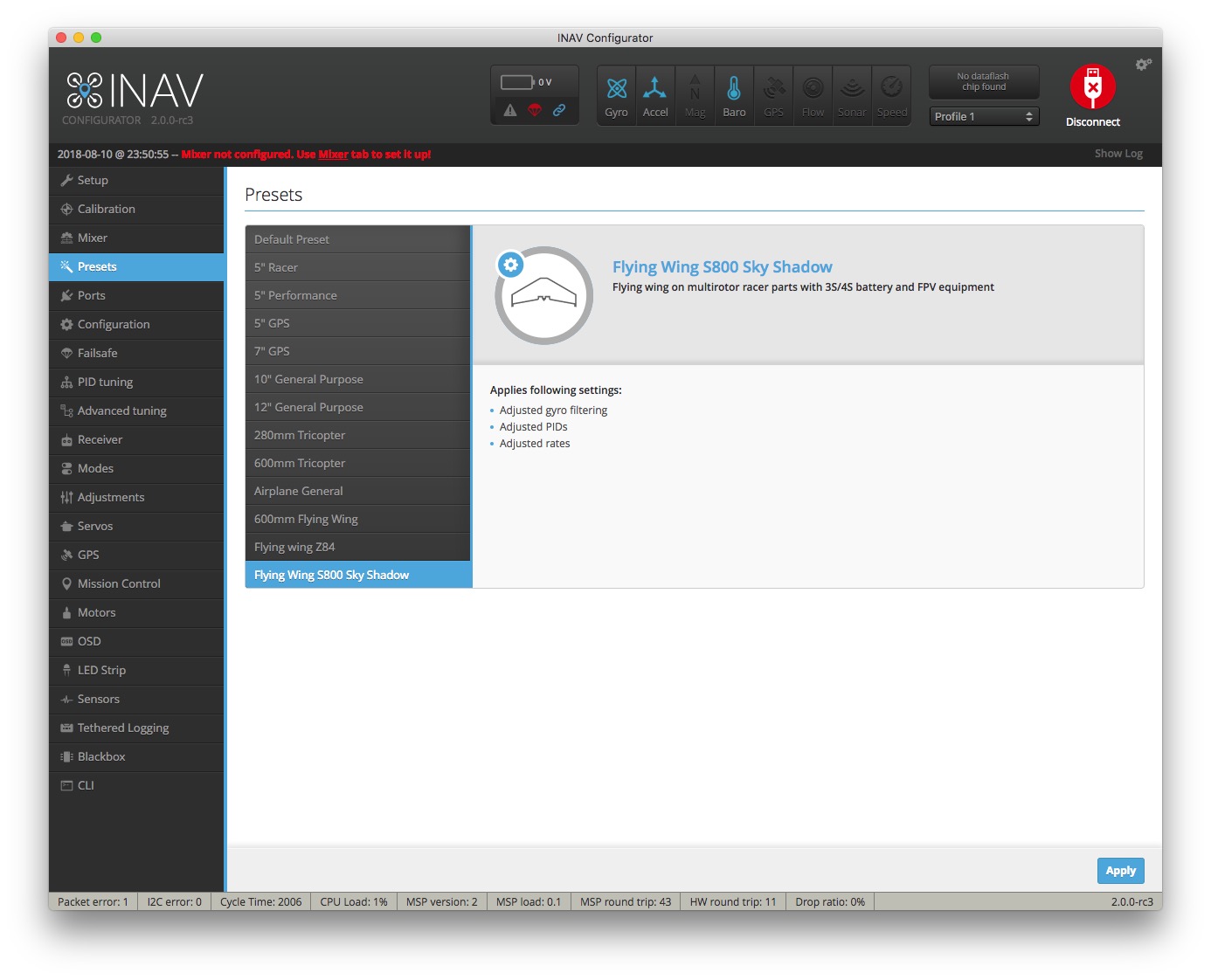
Dort wählen wir da passende Model aus. Bei unserem AR Wing nehme ich den S800, der sollte so ca an den AR Wing rankommen….
Nach apply ist ein Neustart erforderlich.
Dann gehts weiter mit dem Reiter Ports. Wieviele UARTs ihr hab, oder wo Serial RX usw gesetzt werden muss, müsst Ihr aus der Anleitung euerer FC entnehmen.
Das ist leider sehr unterschiedlich. Darum kann ich hier nicht direkt drauf eingehen.

Diesen Tap schließen wir dann jeden Fall auch wieder mit save and reboot.
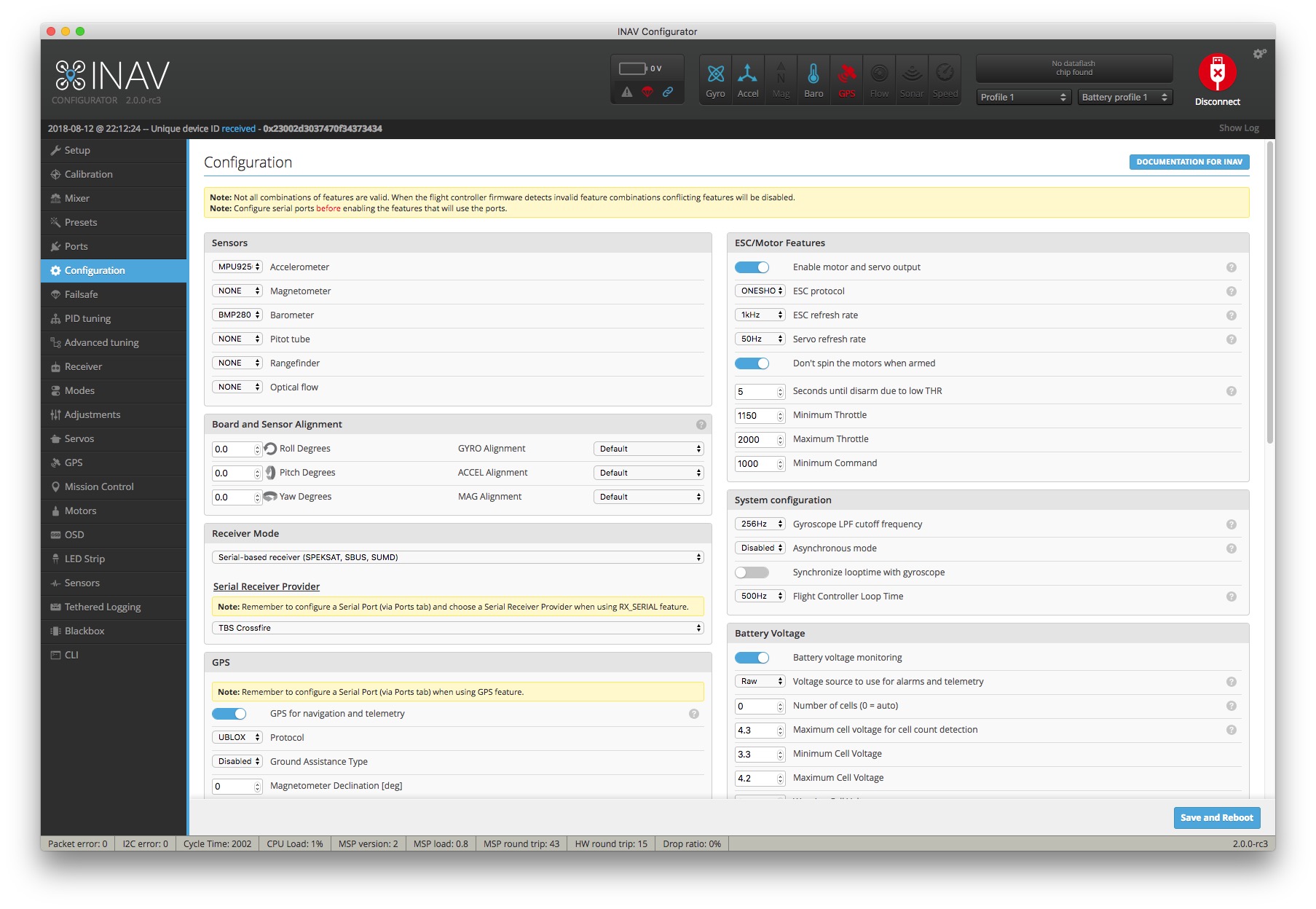
Weiter geht’s zu Konfiguration.
Hier überprüfe ich meine Sensoren, sollte hier ein Kompass (Magnomenter) haben, rate ich euch es abzuschalten. Das wird beim Wing nicht wirklich benötigt.
Dann kann noch bei Board and Sensor Alignment das Board auf der YAW Achse gedreht werden, fall die FC in irgend einer weise gedreht wurde.
Bei Receiver Mode natürlich passenden Empfänger auswählen. Bei mir ist es Serial RX und TBS Crossfire
Dann wird das GPS aktiviert und passendes GPS ausgewählt. In meinem Fall ein Ublox.
Den Namen vergebe ich meisten auch gleich, damit ich hinterher immer weiß, wo das diff File hin gehört.
Auf der rechten Seite aktiveren wir dann den Motor Servo output. ESC Protokoll verwende ich oneshot (bei euch wieder abhängig vom ESC).
Bei Batterie Volltage passe ich den Voltage Scale noch an, damit die Gesamtvollzahl mit dem Lipochecker meines Vertrauens übereinstimmt.
Den Currentsensor lasse ich erstmal außen vor. Denn können wir erst nach einem Flug einstellen. Somit heben wir uns das für Später auf.
Bei other Features schalte ich AIR Mode noch hab. Sehe ich bei einem Wing keinen Sinn.

So das war jetzt schon mal ne ganze Menge in dem einzigen Tap. Weiter geht es zum Failsafe. Dort wird es wieder weniger. Hier stellen wir nur auf RTH um, damit unser Wing auch wieder nach Hause kommt:

Bei dem Reiter PID ändern wir erstmal nur Max Roll und Pitch Angle auf 60º WICHTIG. Sonst ist das Teil am ersten Start im Angle kaum fliegbar oder Ihr braucht ewig Platz.
Des Weiteren stell ich ganz unten TPA auch noch auf 0:

Alle anderen Werte soll uns Später Autotune einstellen.
Bei advanced Tuning stellen wir die RTH Altitude auf 7000 (cm). Das bewirkt, das bei return to home, der Wing auf 70 Steigt. In der Höhe sollten wir dann keine Bäume mehr als Hindernisse haben…. gegen Berge ist man da halt dann nicht abgesichert….

Im Receiver Tab könnt hier dann überprüfen ob euere Empfänger richtig konfiguriert ist. Auch sollte ihr die Endpunkte nachsehen. Damit da keiner unter 1000 und nicht über 2000 ist.

Bei den Modes müsst Ihr alles vergeben was Ihr haben wollt. Bei NAV POSHOLD muss noch zusätzlich NAV ALTHOLD aktiviert werden, sonst funktioniert das nicht.

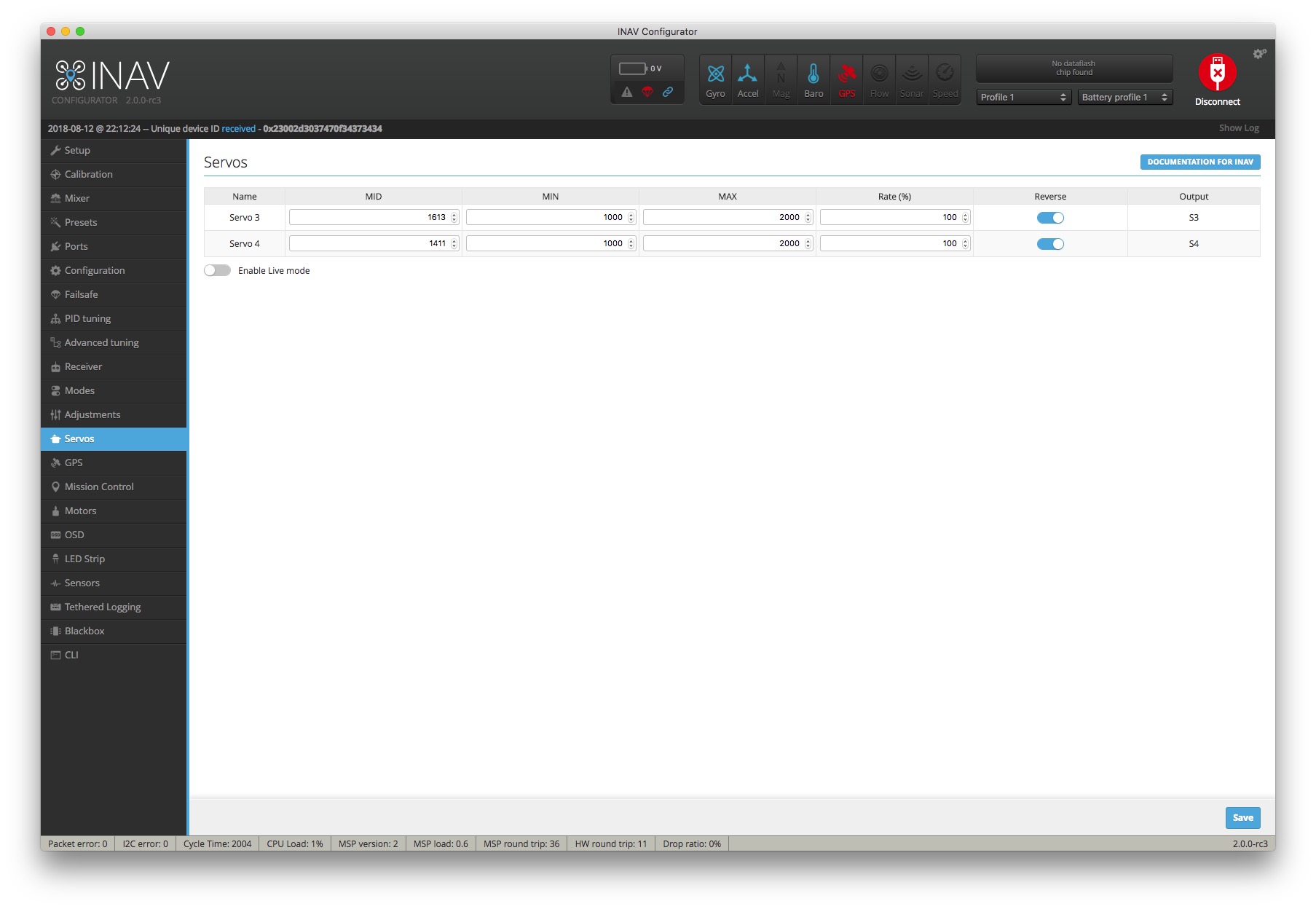
Unter Servo müsste ihr eigentlich nur reverse einstellen, falls ein Servo sich in die falsche richtung dreht. Alle anderen Werte kann man so belassen.
Danach Springen wir noch runter auf OSD und stellen dies nach unseren wünschen ein.

So weit sind wir dann mit der GUI fertig und wir gehen zu dem CLI (Command line Interface) über.
Zu Sicherheit stellen wir den Max Roll/Pitch Angle nochmal auf 60º:
set max_angle_inclination_rll = 600
set max_angle_inclination_pit = 600
Auch setzen wir zur Sicherheit die RTH Höhe nochmals auf 70 Meter mit:
set nav_rth_altitude = 7000
Um aus jeder Position den Wing wieder armen zu können setzten wir small angle auf 180:
set small_angle = 180
Failsafe Throttle hat den Standwert auf 10 Sekunden. Was bedeutet, wenn Ihr für 10 Sekunden 0 Gas hab, wird RTH eingleichtet. Ob man das jetzt haben will oder nicht muss jeder für sich selber entscheiden. ich habs ausgeschalten:
set failsafe_throttle_low_delay = 0
Wenn Ihr fertig seid, save nicht vergessen!
Diese Werte habe ich aus dem Wki von iNav entnommen und bin damit recht zufrieden:
https://github.com/iNavFlight/inav/wiki/Fixed-wing-guide
Was ja bei mir irgendwie garnicht wollte, war der Autolunch Modus.
Der muss erstmal in der richtigen Reihenfolge aktiviert werden.
Angle/Auto launch -> arming -> Vollgas rein
UPDATE:
Alternativ kann Autolaunch auch permanent in der Konfiguration aktiviert werden!
Danach ist Autolaunch bei jedem arming aktiv (Angle muss nicht zusätztliche aktiviert werden, für den Autostart)
Das ganze sieht dann so aus:
ARM -> 3/4 und los geht es.
Autolaunche kann auch jederzeit abgebrochen werden, wenn man Roll kurz nach links oder rechts drückt!
Ich hab den Wing nur hoch bekommen, wenn ich mich wie ein Discuswerfer gedreht hab, bis der Motor angelaufen ist und dann geworfen habe.
Damit wollte ich mich jedoch nicht abfinden und hab die autolaunch Settings optimiert:
set nav_fw_launch_velocity = 200
set nav_fw_launch_accel = 1863
set nav_fw_launch_max_angle = 60
set nav_fw_launch_detect_time = 30
set nav_fw_launch_thr = 1900
set nav_fw_launch_idle_thr = 1000
set nav_fw_launch_motor_delay = 500
set nav_fw_launch_spinup_time = 50
set nav_fw_launch_min_time = 0
set nav_fw_launch_timeout = 10000
set nav_fw_launch_max_altitude = 0
set nav_fw_launch_climb_angle = 35
save nicht vergessen…. Mit diesen Werten reicht ein kleiner Ruck am Wing und der Motor startet und kann dann im Anschluss geworfen werden.
Dann kann es eigentlich an den Maidenflug gehen…. eventuell noch mal den Highfivecheck machen und dann sollte der Vogel in die Luft gehen:
Zum Thema Autotune:
Autotune wird während des Fluges aktiviert, man sollte hier im Angle Modus ein Bewegungen
auf jeder Achse einzeln fliegen, für Roll und Pitch somit getrennt fliegen. Soweit es einem möglich ist. Also schon mal ein großes Flugfeld aussuchen. Es wird alle 5 Sekunden ein neuer Wert ermittelt. Also um so länger Autotune geflogen wird. Um so besser sollte es funktionieren. Beim landen sollte Autotune deaktiviert sein, damit durch die Landung keine falschen Werte ermittelt werden. Nicht vergessen im OSD dann noch auf save and reboot zu gehen, sonst sind die neuen Werte verloren.
Im Wiki gibt es hier eine Beschreibung dazu: https://github.com/iNavFlight/…totune%20-%20fixedwing.md
Hier mal mein Autotuneflight, soweit ich die Beschreibung verstanden habe, soll man das so machen:
Autotrim:
Wenn Autotrim aktiviert ist, sollte man am besten im Manualmodues für ca 2 Sekunden gerade auszufliegen. Dann wird hier bei den Servo eine neue neutral Position gespeichert. Im Anschluss sollte man zur Landung ansetzen. Da dieser Wert erst beim disarmen gespeichert wird. Somit müssen wir hier im Gegensatz zu Autotune, die Funktion Autotrim bis zum Schluss aktiviert lassen. Sobald Autotrim im Flug deaktiviert wird, werden die vorher gespeicherten Werte wieder verwendet.
Current Sensor einstellen.
Das ist eigentlich kein Hexenwerk. Ihr nehm einen vollgeladenen Lipo und fliegt ein paar runden mit dem Wing. Beim Landen notiert Ihr auch die verbrauchent mah aus dem OSD. Danach wird der Lipo wieder vollgeladen. Nach dem Ladevorgang notiert Ihr Euch die mAh, die das Ladegerät wieder in den Lipo gepresst hat. Dann brauchen wir noch den aktuellen Wert aus der GUI vom Current Sensor. Der war bei mir standart auf 250 Eingestellt.

Die Formal ist jetzt (OSD Wert / Ladegeräte Wert) * Current Scale. kling kompliziert. Bei mir ist dann 209,2023423xxxx herausgekommen. Somit hab ich dann in die GUI 209 eingetragen.
Auch noch sehr nützlich, die Stick Kombination.
