RotorRiot FC F4 mit softmounted Gyro
Ich hab vor kurzem das Innenleben von meinem X210 upgegradet. Hier hab ich mich dann für die RotorRiot FC entschieden.
Bestellt hab ich die bei Flyingmaschines (discounted) und hatte nen Kurs von 44,95 Euro.
Fangen wir mal mit den technischen Daten und dem Lieferumfang an.
Spezifikation
- Soft mounted Gyro MPU6000
- Soft mounted Anschlüsse
- Intuitives Löt-Layout
- 3 UARTs mit änderbarem Inverter auf UART1 für SBUS
- BF OSD
- Breakout Port für 4in1 ESC
- STM32 F405
- Target: OmnibusF4
- LiPo Input 2S-6S
- eingebauter Current Sensor
- 8MB Blackbox Speicher
- SBUS, DSMX, CRSF Support (Crossfire)
Lieferumfang
- Rotor Riot – Riot Control F4 FC
- Anschlusskabel ESC
- Hardware
- Pinlayout
- Buzzer
- XT60 Anschlusskabel (in Schwarz
 )
) - Case
Liest sich alles schon mal sehr gut. Ungewöhnlich sind die 8MB fürs Datenlogin, jedoch ausreichend. 2S-6S kann der FC auch ab. Somit hat man schon mal Reserve.
Das Ganze sieht dann so aus:

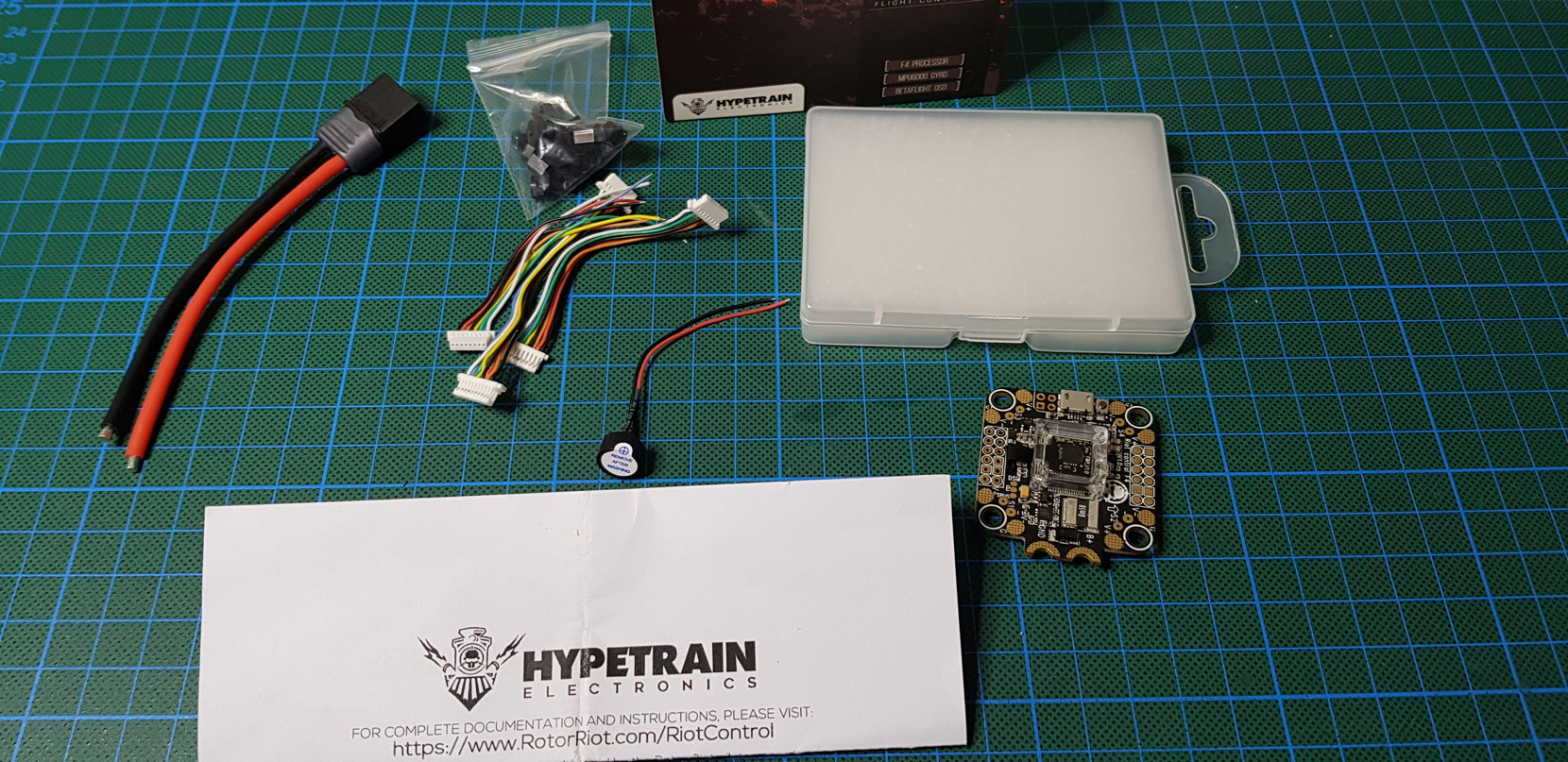
Wir sind hier mit ausreichend Kabeln bewaffnet, vom Piepser finden wir die kleine Version vor. Auch sind alle Variationen für die Steckverbindung zu 4in1 ESCs dabei.
Die FC wird softgemounted verbaut und der Gyro ist auch Softgemountet, somit doppelt gedämpft. Womit ich nicht ganz klargekommen bin, sind die Standoffs mit nur Muttern. Da hab ich wieder mein herkömmliches Set verbaut.
Von den Lötstellen ist die FC gut durchdacht, so wie es auch zu erwarten war. Stromversorgung und ESC Signalkabel lassen sich jeweils von unten und oben Löten. Beim Löten muss man halt aufpassen, das man das Gyrocase nicht mit anbrutzelt. Aber ansonsten ging das alles gut von der Hand.


Eine weitere Eigenheit der FC ist, das aufgrund der Anordnung von USB und XT60, der XT60 immer nach rechts oder links montiert werden sollte. Ansonsten ergibt sich das Problem, dass der USB-Port nach vorne oder nach hinten zum Copter liegt. Was bauartbedingt dann meistens dazu führt, dass man sehr schlecht an den USB-Port ran kommt.
Unter Betaflight wird der FC als DYSF4PRO eingebunden. Diese hab ich in meinen Stingy Frame verbaut. Die ließ sich jedoch bei weitem nicht so gut verlöten und auch der Gyro ist nicht softgemounted.
Bei der mitgelieferten Kurzanleitung/Schaltplan ist zwar alles beschrieben. Jedoch würde ich jedem empfehlen mal einen Blick auf das erweitere PDF von Rotor Roit zu werfen. Hier sind auch die Ports und Einstellungen ausführlicher beschrieben.
In einem kleinen Unboxing hab ich nochmal alles zusammen gefasst.
Einen Testflug mit BF 3.4RC5 und Freestyle Settings hat sie auch gut gemeistert und ich muss sagen, das sich die sehr angenehm fliegt, so bei 55 Sekunden hab ich die FC mal nen bisschen belastet. Propwash hält sich in Grenzen. Dies lässt sich jedoch bestimmt mit nen bisschen Tuning noch weiter eliminieren. Für Stock ist das schon mal recht gut:
UPDATE:
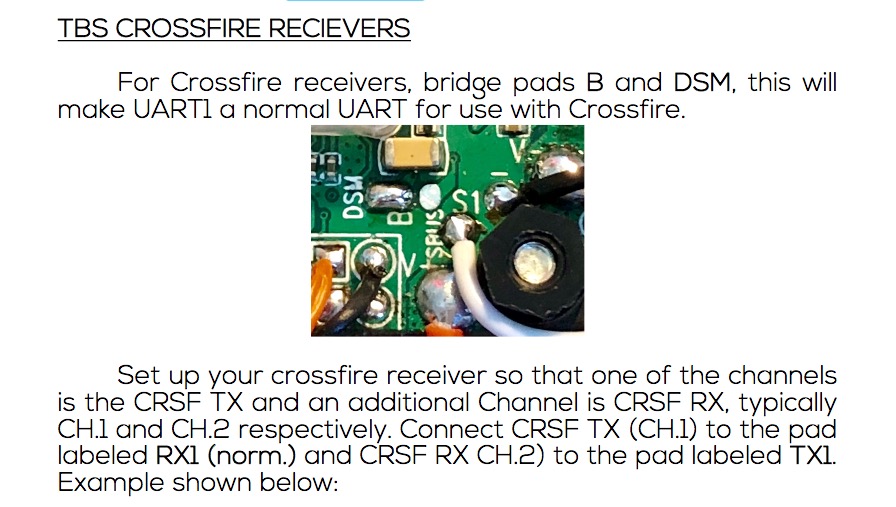
Ich hab vor kurzem den Copter von FrSky auf Crossfire umgerüstet….. damit nicht alle anderen Anleitungsmuffel auch in die gleiche Falle tappen…
Man muss den Jumper von SBus auf Spektrum setzen damit das ganze richtig funktioniert. Hatte ich bis jetzt auch sonst noch bei keiner FC: